เรือสำรวจใต้ท้องน้ำ ด้วยระบบควบคุมระยะไกล
เรือสำรวจใต้ท้องน้ำ ด้วยระบบควบคุมระยะไกล












Project Description
โครงการเรือสำรวจใต้ท้องน้ำ ด้วยระบบควบคุมระยะไกล โดยใช้เซ็นเซอร์วัดความลึกใต้ผิวน้ำ เพื่อใช้ในการสำรวจและรวบรวมข้อมูลระดับความลึกใต้น้ำในพื้นที่ต่างๆ
- Client:ฝ่ายจัดสรรน้ำ
- Project date:2567
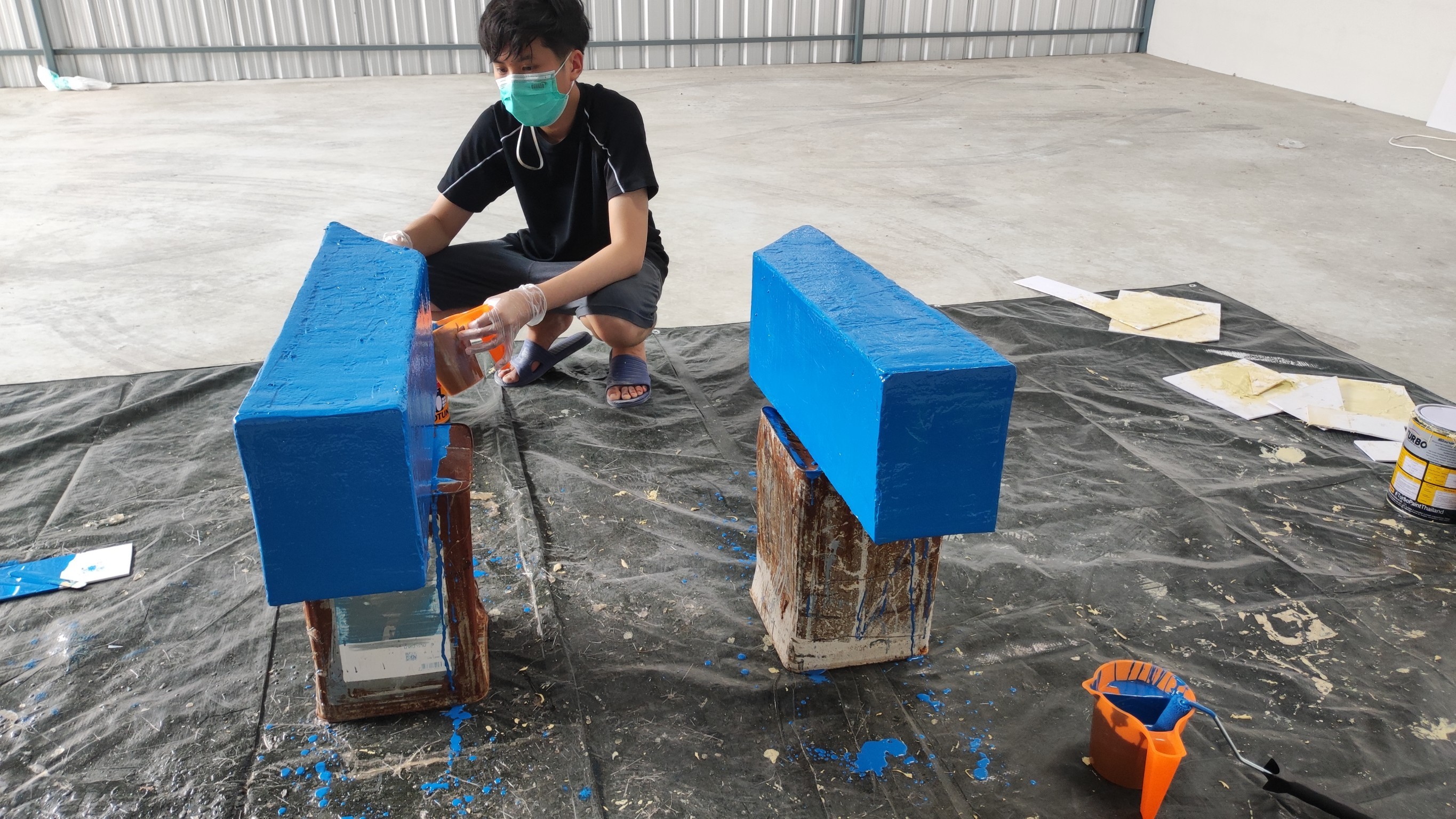
ตัวเรือสร้างขึ้นจาก พลาสวูด ซึ่งเป็นวัสดุที่มีน้ำหนักเบาและทนทาน จากนั้นได้ทำการ เคลือบด้วยไฟเบอร์กลาสเพื่อเพิ่มความแข็งแรง ทนทานต่อน้ำ และอายุการใช้งานที่ยาวนาน
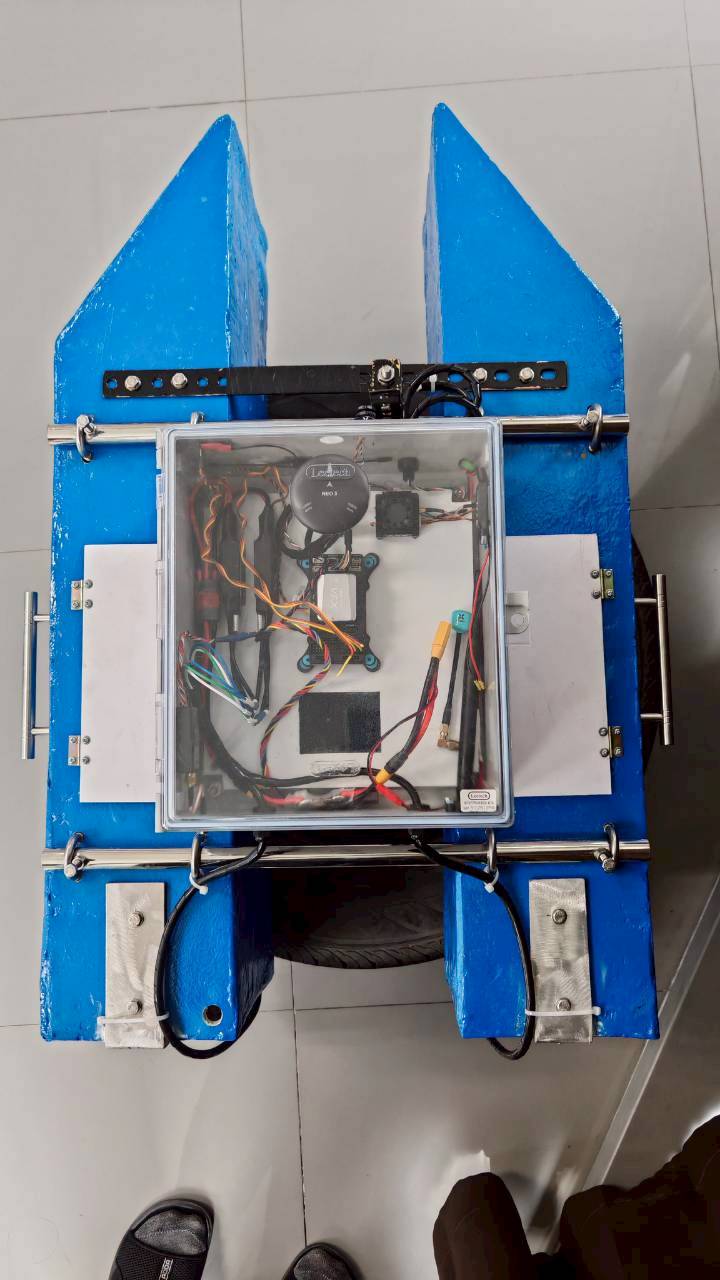
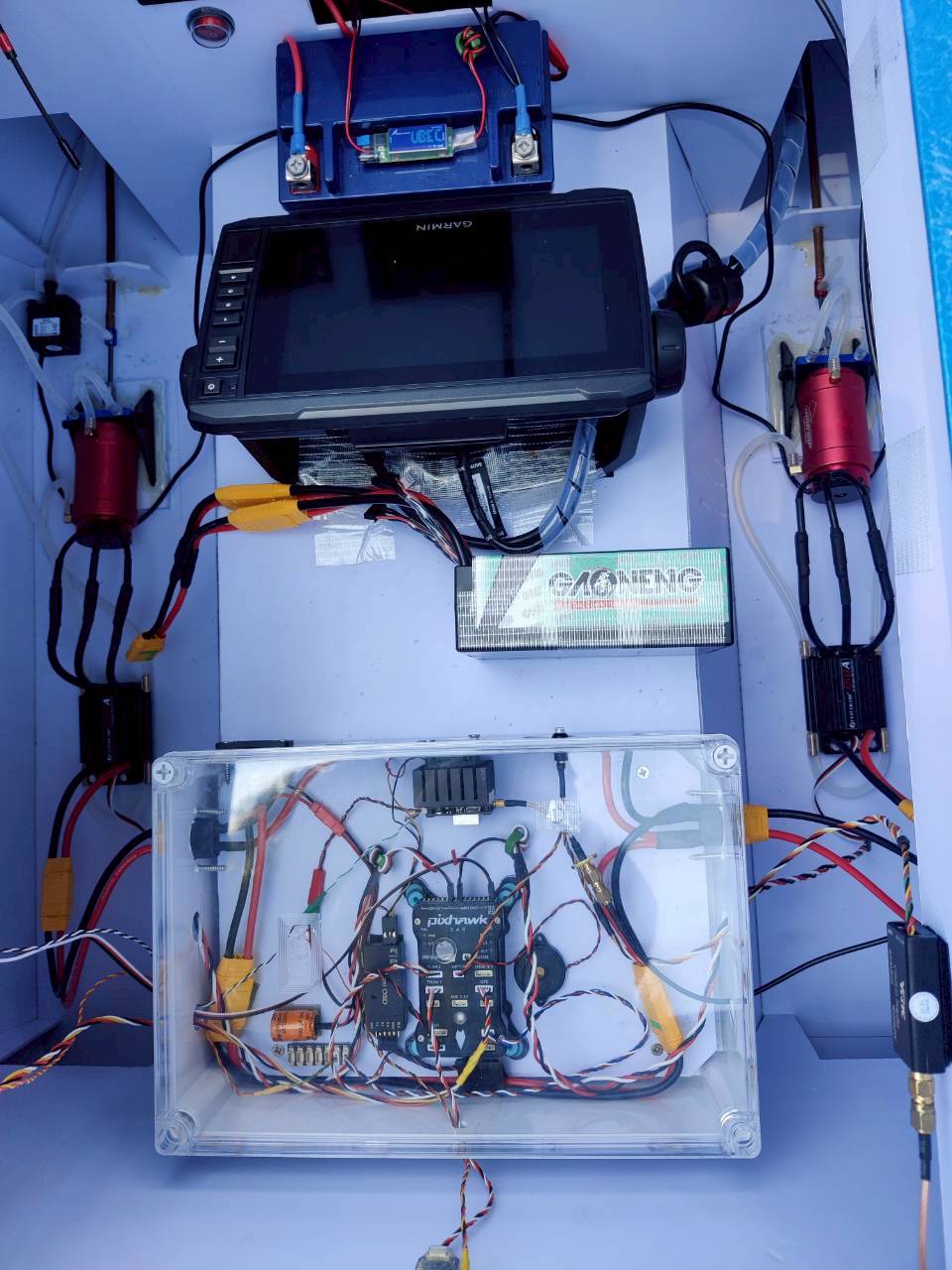
ระบบควบคุมของเรือใช้ Pixhawk ซึ่งเป็นตัวควบคุมการบินอัตโนมัติ โดยได้ ดัดแปลงการควบคุมมาจากระบบรีโมทคอนโทรลที่ใช้กับโดรน ทำให้เรือสามารถเคลื่อนที่ได้อย่างแม่นยำ
ในโครงการนี้ รับผิดชอบในทุกขั้นตอน การออกแบบโครงสร้างตัวเรือ การประกอบระบบควบคุมและกลไกต่างๆ
เรือติดตั้ง เซ็นเซอร์วัดระดับใต้น้ำ ฺBlue robotic เพื่อเก็บข้อมูลความลึก ซึ่งข้อมูลที่ได้จะถูกนำมา คำนวณและประมวลผลผ่านโปรแกรม Python เพื่อสร้างเป็นไฟล์ข้อมูลที่พร้อมสำหรับใช้ในการสร้าง แผนที่ใต้น้ำ